- 按照Readme安装ROS2 SDK:
https://github.com/orbbec/OrbbecSDK_ROS2/tree/v2-main
- 开启ROS2自动补全:
eval "$(register-python-argcomplete ros2)"
eval "$(register-python-argcomplete colcon)"
- 安装SDK:
sudo apt update
apt list | grep orbbec
sudo apt install ros-humble-orbbec-camera ros-humble-orbbec-description
- 修改udev权限:
sudo cp /opt/ros/$ROS_DISTRO/share/orbbec_camera/udev/99-obsensor-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && sudo udevadm trigger
- 下载ORBBEC VIEWER:
https://www.orbbec.com/developers/orbbec-sdk/
- 通过USB连接设备,运行ORBBEC VIEWER,在顶栏选中若干视图进行查看:

- 测试ROS2 SDK:
ros2 run orbbec_camera list_devices_node
输出:
USB port_id: 2-2-2
Modified USB port_id: 2-2
[INFO] [1768203886.203032865] [list_device_node]: - Name: Orbbec Gemini 336L, PID: 0x0807, SN/ID: CPC7B53000AG, Connection: USB3.2
[INFO] [1768203886.203066554] [list_device_node]: serial: CPC7B53000AG
[INFO] [1768203886.203074780] [list_device_node]: usb port: 2-2
[INFO] [1768203886.203091584] [list_device_node]: usb connect type: USB3.2
ros2 launch orbbec_camera gemini_330_series.launch.py
输出若干调试信息。
检查ROS2话题:
❯ ros2 topic list
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/theora
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/image_raw/compressedDepth
/camera/depth/metadata
/camera/depth/points
/camera/depth_filter_status
/camera/device_status
/diagnostics
/parameter_events
/rosout
/tf
/tf_static
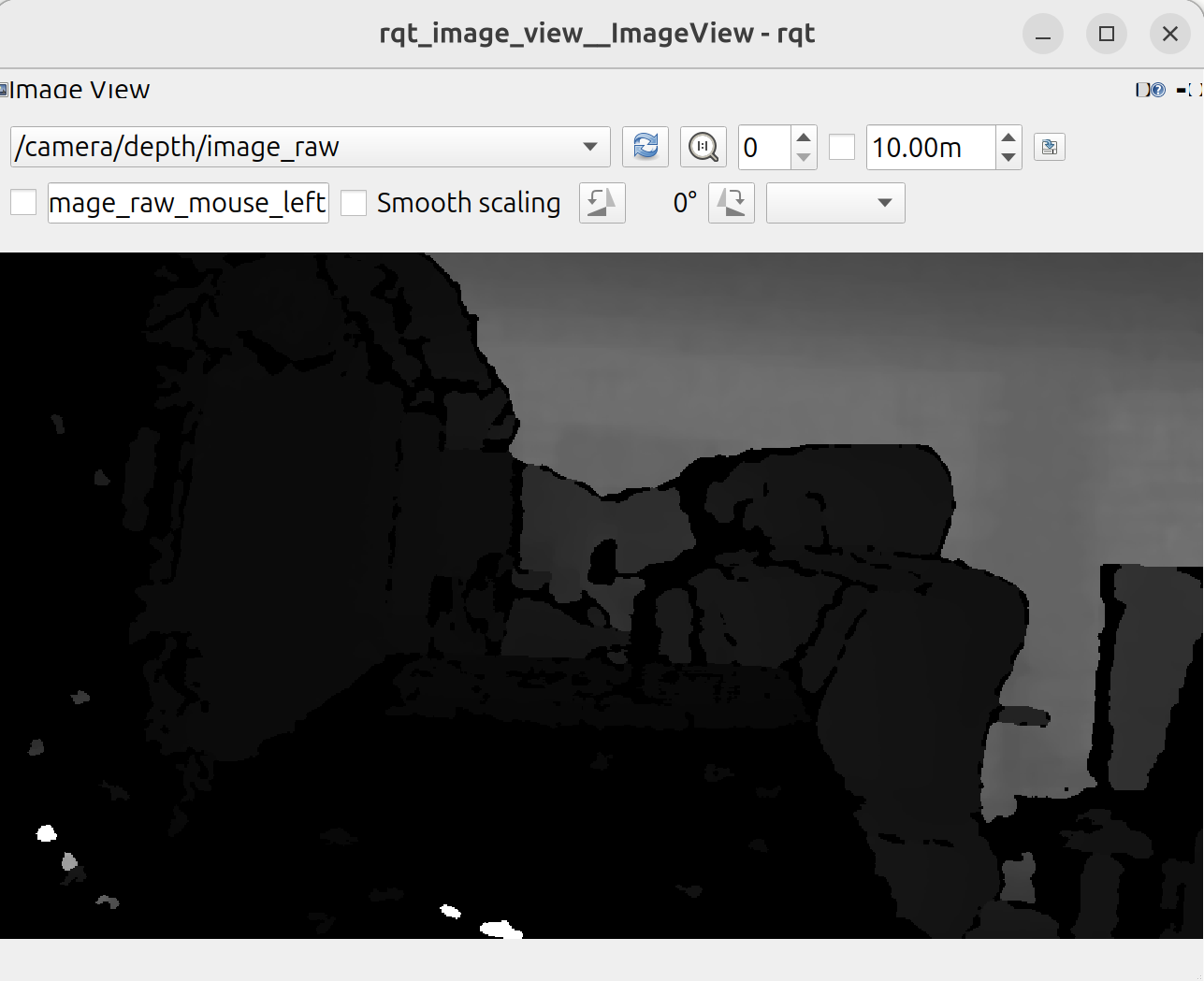
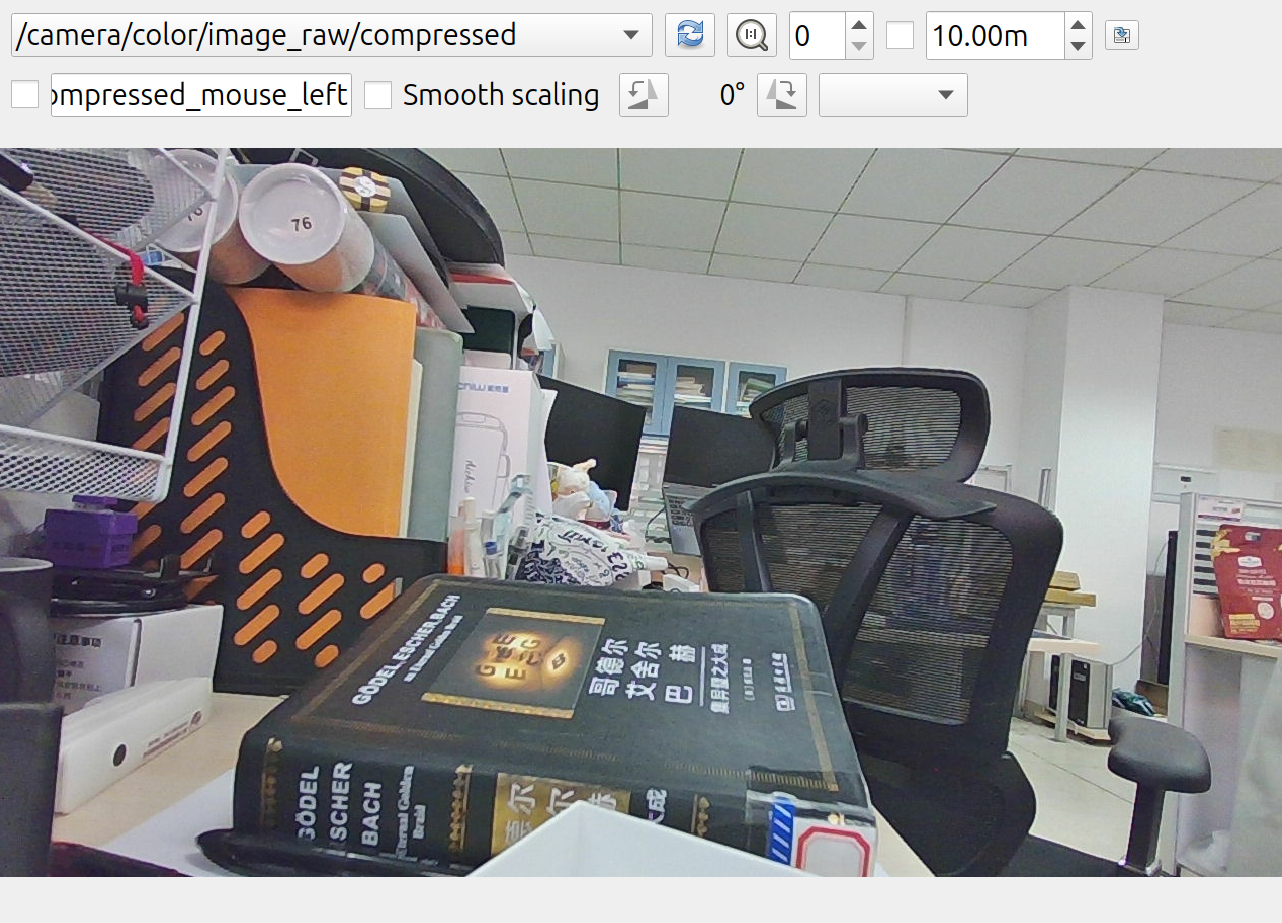
使用image view查看图像及压缩图像等话题:
- 修改启动参数,开启IMU:(4.1. 启动参数 — OrbbecSDK V2 ROS2 封装 文档)
ros2 launch orbbec_camera gemini_330_series.launch.py enable_sync_output_accel_gyro:=true
❯ ros2 topic list
/camera/accel/imu_info
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/theora
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/image_raw/compressedDepth
/camera/depth/metadata
/camera/depth/points
/camera/depth_filter_status
/camera/device_status
/camera/gyro/imu_info
/camera/gyro_accel/sample
/clicked_point
/diagnostics
/goal_pose
/initialpose
/parameter_events
/rosout
/tf
/tf_static
读取IMU数据:
ros2 topic echo /camera/gyro_accel/sample
输出数据格式:
header:stamp:sec: 1768209990nanosec: 778451968frame_id: camera_accel_gyro_optical_frame
orientation:x: 0.0y: 0.0z: 0.0w: 1.0
orientation_covariance:
- -1.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:x: 0.011706476099789143y: 0.0021284501999616623z: -0.00478901294991374
angular_velocity_covariance:
- 0.01
- 0.0
- 0.0
- 0.0
- 0.01
- 0.0
- 0.0
- 0.0
- 0.01
linear_acceleration:x: 0.821850597858429y: -9.758130073547363z: 0.3576904535293579
linear_acceleration_covariance:
- 0.01
- 0.0
- 0.0
- 0.0
- 0.01
- 0.0
- 0.0
- 0.0
- 0.01
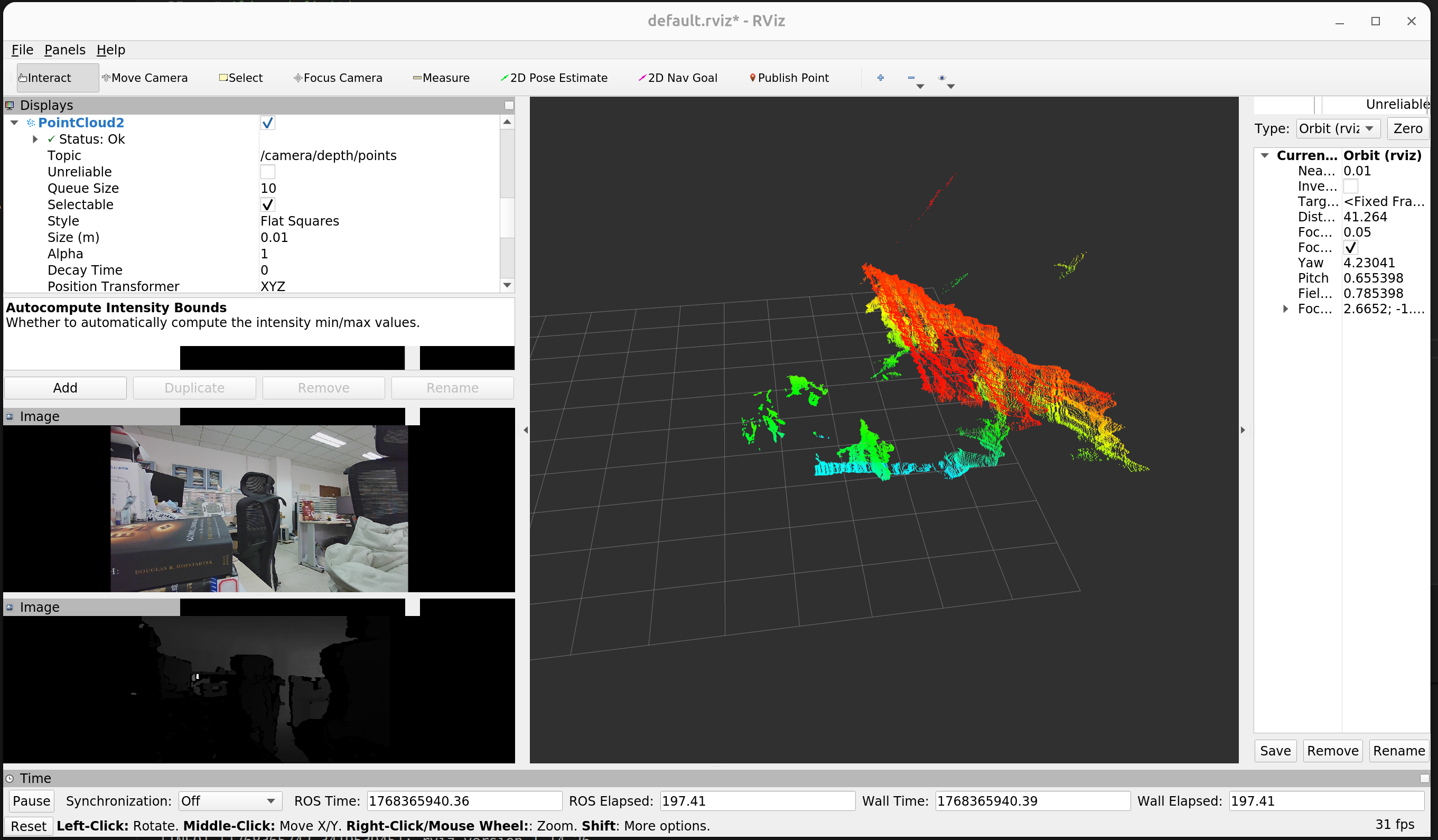
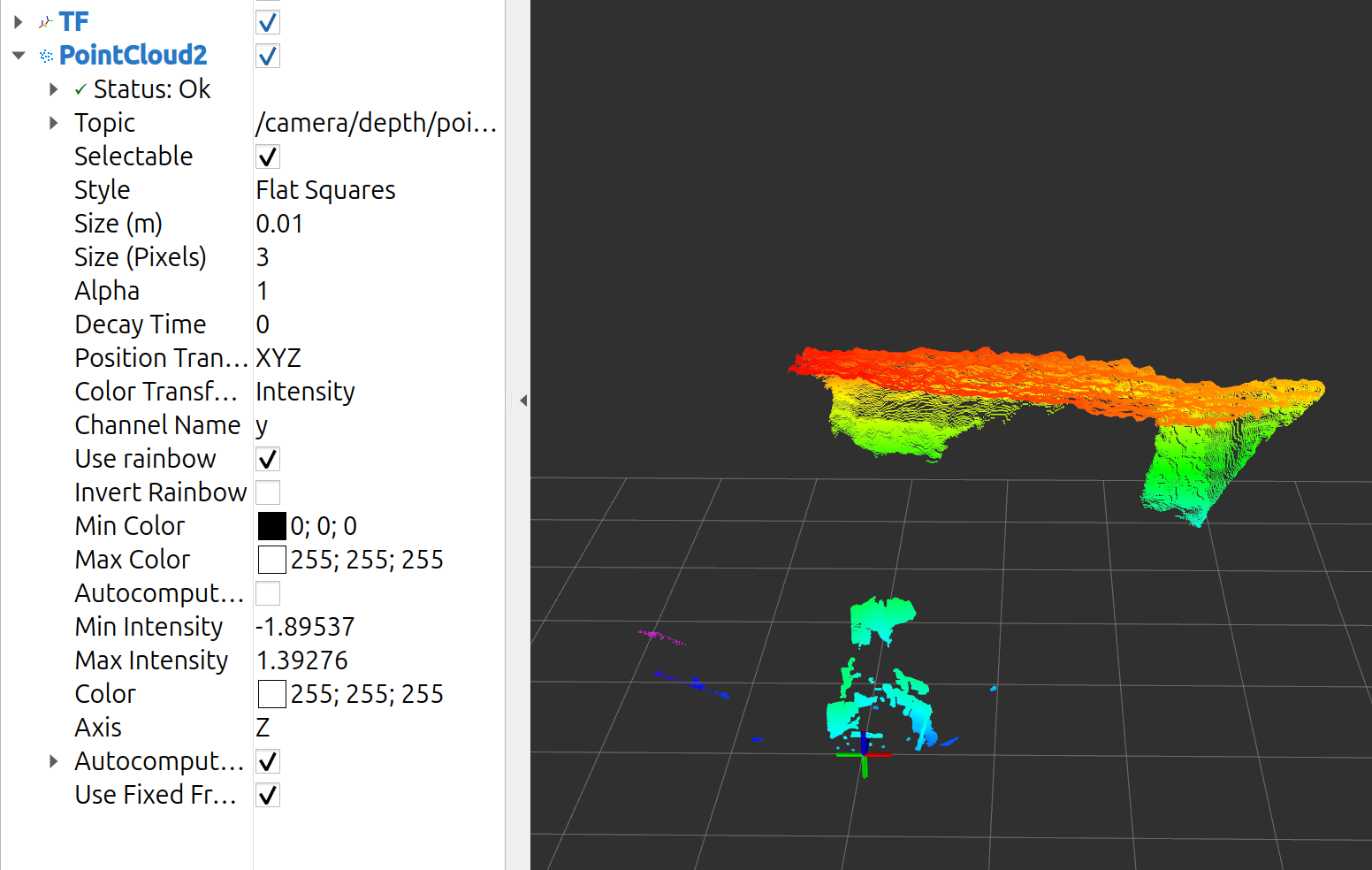
- RViz调试
在RViz中可以查看TF、点云等数据
- docker调试
运行Ubuntu20.04 ROS noetic的docker环境测试ROS1 SDK,运行正常: