引言
随着交通事故频率的增加,行人安全问题成为社会关注的焦点。尤其是在危险交通场景中,行人主动回避行为对减少交通伤害至关重要。然而,现有的行人避让行为研究尚未量化其生物力学特征,这限制了相关安全技术的开发与应用。清华大学聂冰冰老师研究团队通过采用NOKOV度量动作捕捉系统,量化行人避让行为的动力学与运动学特征,为行人安全研究提供新的数据支持,并为车载主动安全系统设计提供参考。
一、 研究背景
当前,行人避让行为研究面临的主要问题是如何准确评估行人和车辆之间的交互过程。尽管已有研究探讨了生物力学模型和仿真技术,但在实际交通环境中,缺乏高精度的数据支持。特别是行人避让行为中的运动学特征和动力学特征尚未得到深入量化,导致现有模型在交通安全系统中的应用效果有限。本研究旨在填补这一空白,通过NOKOV度量动作捕捉系统,精确获取行人在避让车辆时的动作数据,从而为交通安全技术的优化提供科学依据。
二、 研究方法概述
1. 行人自然反应平台
为了研究行人避让行为的动力学与运动学特征,研究团队开发了一个行人自然反应实验平台,并招募志愿者在虚拟交通环境中执行过马路等动作。
2. 模拟交通事故危险场景,测试自然回避反应
实验模拟了交通事故中的危险情境,通过设置虚拟障碍物和车辆,测试受试者的自然回避反应。
3.NOKOV度量动作捕捉系统记录行人运动学数据
NOKOV度量动作捕捉系统被用于精确记录实验中的行人运动数据,包括行人的速度、加速度、关节位置、角度。此外还使用生理信号系统记录下肢表面肌肉的肌电图信号,以测量肌肉激活状态并捕获骨盆运动特征。
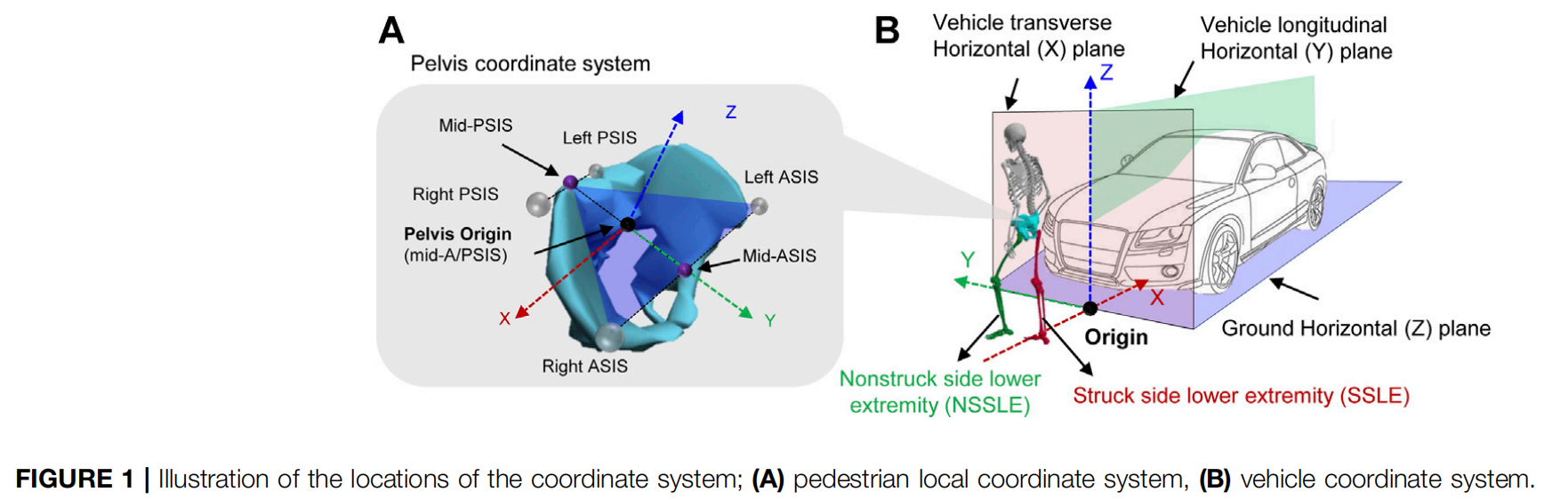
坐标系位置图示(A)行人局部坐标系(B) 车辆坐标系
三、 实验验证
本研究通过NOKOV度量动作捕捉系统,提取了行人在与车辆接近时的动态行为数据。
1. 研究团队选择了三类典型的避让行为:向后避让、向前避让和斜步避让。
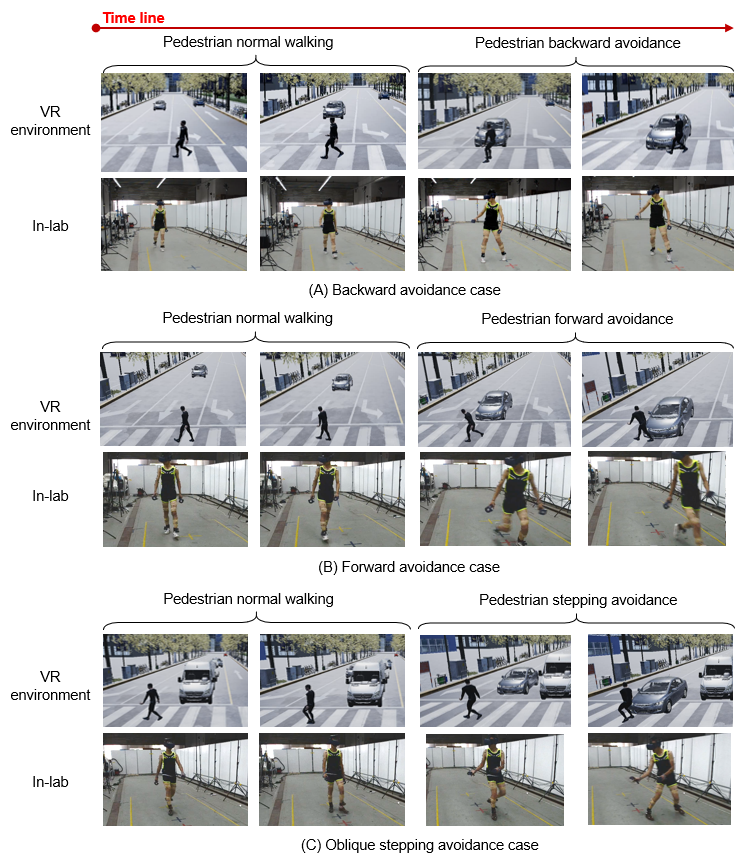
2. 通过高精度的动作捕捉技术,记录了行人避让过程中的速度变化、加速度波动、关节角度变化等关键数据。
研究结果表明,不同的避让行为对行人安全和避让效果具有显著影响。通过量化这些数据,研究人员能够分析出最有效的避让策略,进而为提高交通安全提供实用建议。
四、 本研究的贡献
过本研究,NOKOV度量动作捕捉系统为行人避让行为的动力学与运动学特征提供了精确的数据支持,为交通安全领域的研究提供了新的视角和工具。
1. 量化了碰撞前阶段的行人车辆交互过程,并通过动捕系统提取了与车辆碰撞前高精度的行人姿态,这些被称为“碰撞前姿势”。
2. 在调查避障行为对伤害风险和严重程度的影响时,本研究的实验数据可作为开发有限元(Finite Element, FE)和多体(Multi-Body, MB)人体模型和模拟碰撞过程中行人受伤风险的宝贵参考。
未来,基于这些数据的智能车载安全系统将在行人保护和碰撞预防方面发挥重要作用。
五、 应用场景
行人避让行为分析研究的应用,不仅有助于评估行人在交通事故中的受伤风险,还为车载主动安全系统的设计提供了数据支持。通过提供高精度的人体姿态动态数据,NOKOV度量动作捕捉系统能够为该研究及交通安全系统的优化提供宝贵参考,特别是在行人保护和碰撞风险预测方面。未来,基于这些数据开发的行人安全技术有望显著降低交通事故中的行人伤害。
表1行人避让行为的关键特征
|
关键词 |
定义 |
应用场景 |
|
NOKOV度量动作捕捉 |
高精度的动作捕捉系统,记录行人与车辆的动态交互 |
交通安全实验、碰撞风险评估、行人避让行为分析 |
|
动力学与运动学特征 |
行人避让行为的加速度、速度、关节位置和角度数据 |
通过数据分析行人避让反应,评估伤害风险 |
|
行人碰撞前姿势 |
行人避免碰撞前的体态和行为反应 |
用于碰撞风险预测和仿真模型的开发 |
六、 行为避让行为研究FAQ
Q1: 行人避让行为的动力学和运动学特征是什么?
A1: 通过NOKOV度量动作捕捉系统,研究人员能够提取行人在回避车辆时的加速度、速度和关节角度等动态数据,这些数据为交通安全提供了宝贵的参考。
Q2: 本研究对交通安全技术的实际应用有哪些贡献?
A2: 本研究通过量化行人避让行为,为交通安全技术提供了新的数据支持。NOKOV度量动作捕捉系统不仅用于在实验中帮助评估行人受伤风险,还为基于人体模型的仿真分析提供了真实的避让数据,为开发更加智能的车载主动安全系统和行人保护技术提供了参考。
Q3: 实验中选择的三类避让行为对交通安全的影响有何不同?
A3: 实验中,研究团队选择了向后避让、向前避让和斜步避让三种典型的避让行为。每种避让行为对交通安全的影响不同。例如,向后避让可能会增加背部受伤的风险,而向前避让则可能导致面部或胸部的碰撞伤害。斜步避让则可能更有效地避开即将到来的车辆,但可能对膝关节造成更大的负担。因此,研究通过详细分析不同避让行为的特征,为优化行人保护方案提供了有价值的数据。
Q4: 本研究对交通安全技术的实际应用有哪些贡献?
A4: 本研究通过量化行人避让行为,为交通安全技术提供了新的数据支持。NOKOV度量动作捕捉系统不仅帮助评估行人受伤风险,还为基于人体模型的仿真分析提供了真实的避让数据,为开发更加智能的车载主动安全系统和行人保护技术提供了参考。
七、 结论
本研究通过NOKOV度量动作捕捉系统,成功地为行人避让行为的动力学与运动学特征提供了量化数据。这些数据不仅为生物仿真模型的开发和行人安全研究提供了重要支持,也为交通事故中的碰撞风险评估和行人保护系统的设计提供了数据支持。随着交通安全技术的发展,NOKOV度量动作捕捉系统的应用前景广阔,能够为实现更高效、更安全的智能交通系统提供技术保障。
八、 参考文献与作者简介
参考文献
Li Q, Shang S, Pei X, Wang Q, Zhou Q and Nie B (2021) Kinetic and Kinematic Features of Pedestrian Avoidance Behavior in Motor Vehicle Conflicts. Front. Bioeng. Biotechnol. 9:783003. doi: 10.3389/fbioe.2021.783003
通讯作者
聂冰冰(通讯作者),清华大学车辆与运载学院长聘副教授,博士生导师。主要研究领域:汽车智能安全,智能决策与先进防护,数字驾驶人,人车行为机理,应用生物力学。