(USB接口接入深度相机实物图)

设备介绍
犀牛派X1是阿加犀的一款基于高通跃龙QCS8550平台研发的智能边缘计算开发板,采用6核高性能处理器,大核主频高达3.2GHz。集成高性能图形引擎 和综合算力达48TOPS的AI引擎,支持Wi-Fi 7 (2.4G/5G/6GHz),BT5.3/BLE,GNSS等无线通信技术。犀牛派X1开发板拥有丰富的工业接口, 包括USB3.0/USB2.0/USB-C/HDMI/Audio/RJ45等,可广泛应用于工业控制,智能制造,安防监控,智能机器人,数字多媒体等领域。
| 项目 | 参数 |
|---|---|
| 平台 | Qualcomm® QCS8550 |
| AI性能 | ~48 TOPS INT8 |
| OS | AidLux(Android13 + Ubuntu22.04) / Ubuntu22.04 |
| CPU | 1x Kryo Prime 3.2 GHz + 2x Kryo Gold 2.8 GHz + 3x Kryo Silver 2.0 GHz |
| GPU | Adreno 740 |
| 运行内存 | 16GB LPDDR5X |
| 存储 | 128GB |
| 视频编解码 | Decode: 4K@240fps or 8K@60fps H.264/H.265 /Encode: 4K@120fps or 8K@30fps H.264/H.265 |
| Camera | x8, CSI interface reserved |
| HDMI | HDMI OUT X1, HDMI IN x1, 支持HDMI1.4,支持1080P@60Hz, 支持4K@30Hz |
| 无线连接 | Wi-Fi7:802.11be, 2.4G/5G/6G HZ DBS, 2*2 MIMO BT:5.3 |
| USB | USB-A 3.0:x4, USB3.0 Type-C:x1, 支持DP1.4 |
| 音频 | Line in, 3.5mm Interface; Line out, 3.5mm Interface |
| 网络接口 | LAN * 3,WAN * 1 |
| RTC | x1, CR2032(225mAh) |
| 电源 | DC12V 5A |
| 工作温度 | -20℃ ~ +60℃ |
| 外形尺寸 | 125x110x35.5mm |
| 其他接口 | RS232: x2,RS485: x2,40PIN连接器,MIPI—DSI |
深度相机采用Intel RealSense D455 ,适配室内外多场景,常应用于机器人导航、物体识别等领域,其核心硬件参数围绕深度感知、影像采集等方面展开,其详细的硬件参数信息如下:
| 参数类别 | 具体详情 |
|---|---|
| 深度技术 | 主动红外立体视觉技术 |
| 工作距离 | 0.4 - 6 米 |
| 深度分辨率与帧率 | 最高 1280×720 分辨率,90fps;也支持 848×480 分辨率,90fps |
| 深度视场角 | 86°×57°(误差 ±3°) |
| RGB 分辨率与帧率 | 最高 1920×1080,常规支持 1280×800 分辨率下 30fps |
| RGB 视场角 | 86°×57°(误差 ±3°) |
| 惯性测量单元 | BMI055 六轴 IMU |
| 视觉处理器 | Intel RealSense Vision Processor D4 |
| 接口类型 | USB-C 3.1 Gen1 |
| 尺寸 | 124mm×26mm×29mm |
一、深度相机的硬件连接
深度相机接入犀牛派X1任一USB接口即可,均为USB3.0传输
二、登录Aidlux
犀牛派X1开发板上预搭载了Aidlux系统平台,可通过多种方式登录:
1.外接显示屏(HDMI、DP)
2.板卡ip + 8000 端口web浏览器访问
3.通过终端登录
4.ssh 远程连接
5.融合系统版 可使用拷屏工具
登录详情可查看https://docs.aidlux.com/guide/hardware/development-board/X1技术文档
登录密码为:aidlux
可在aidlux桌面的应用中心下载Ubuntu桌面(用于机器人开发)
启动应用服务后,可通过VNC连接到机器人操作系统桌面。
(Ubuntu-Desktop仅为提供可视化机器人桌面环境,也可终端远程的方式直接使用,其他开发可在Aidlux桌面上完成)
三、深度相机的驱动安装
通过VNC连接到Ubuntu Desktop桌面,打开terminal 输入:
sudo apt-get install ros-humble-realsense2-camera #安装深度相机驱动
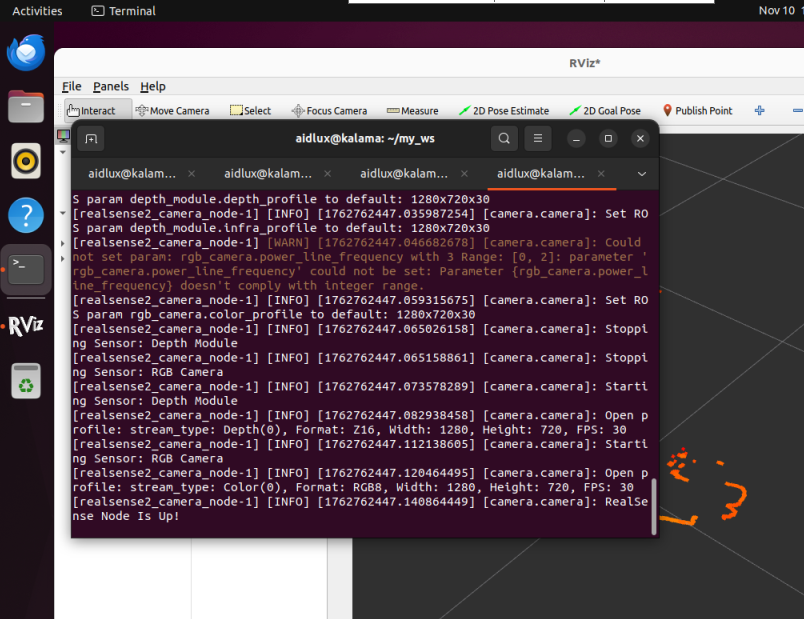
然后打开深度相机
ros2 launch realsense2_camera rs_launch.py
深度相机节点服务启动
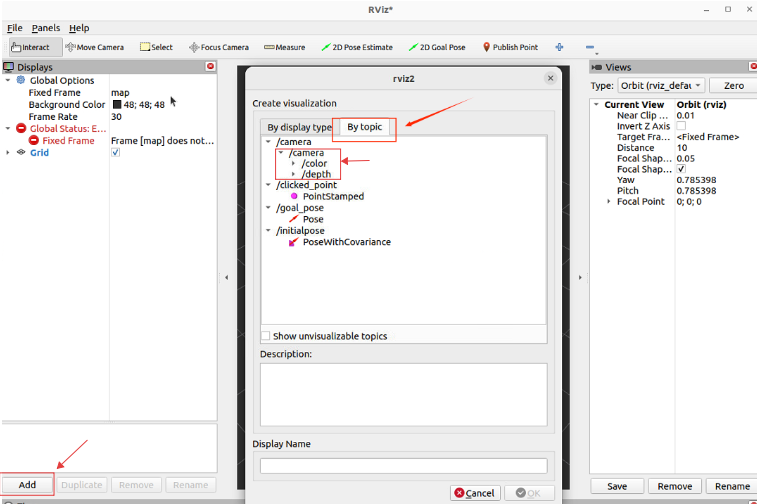
四、在RVIZ2中检验深度相机的开启情况
打开rviz2,在rviz2中验证打开的深度相机图像画面
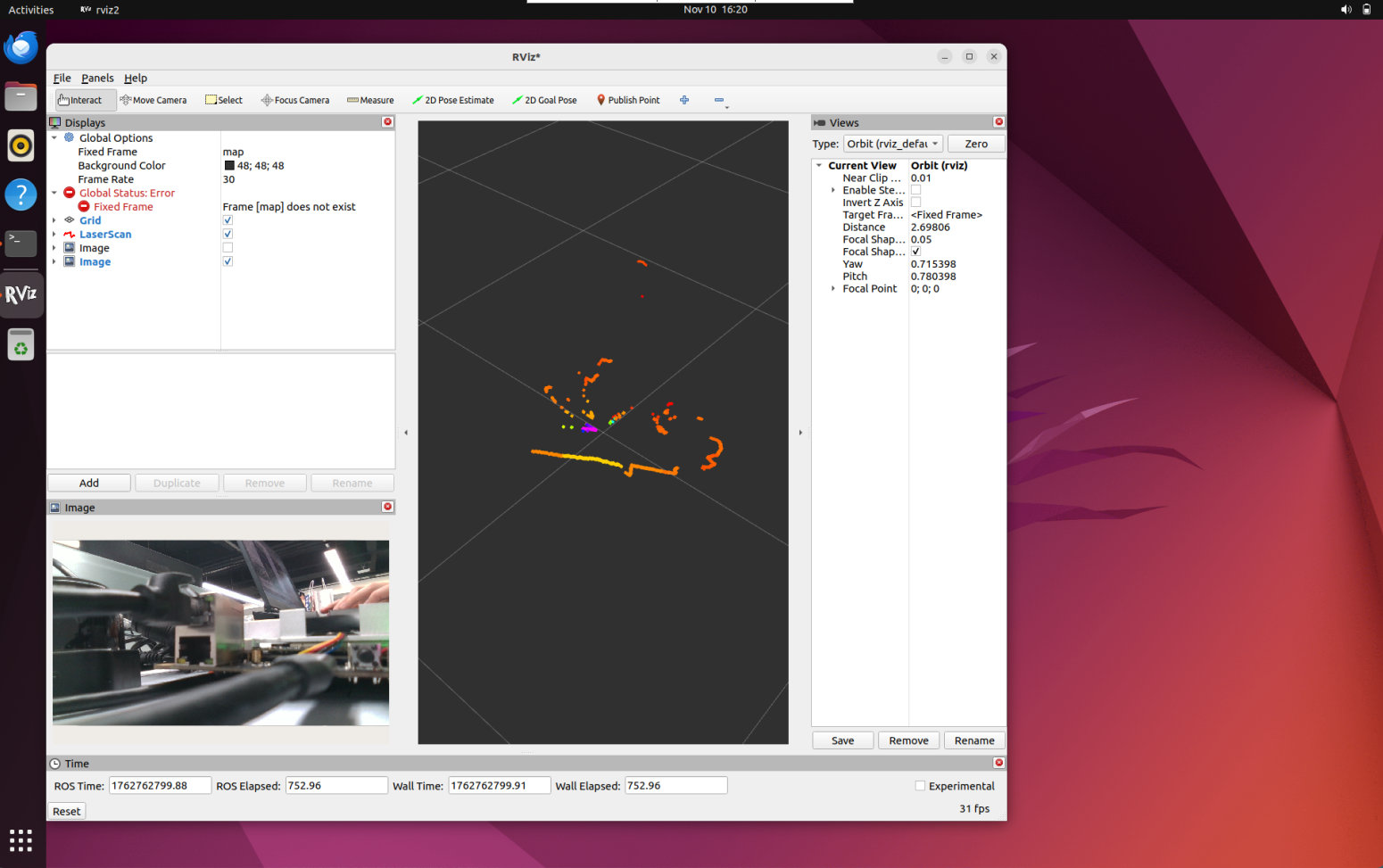
可以看到深度相机已经成功在犀牛派X1上运行
实物运行情况: