博客地址:https://www.cnblogs.com/zylyehuo/
安装依赖
sudo apt updatesudo apt install ros-humble-gazebo-ros-pkgs ros-humble-ros2-control \
ros-humble-ros2-controllers ros-humble-joint-state-publisher-gui \
ros-humble-ackermann-steering-controller ros-humble-slam-toolboxsudo apt install libasio-devsudo apt install ros-humble-rosidl-default-generators ros-humble-rosidl-default-runtime
下载并解压模型
mkdir -p ~/ranger_ws/srccd ~/ranger_ws/srcgit clone -b humble https://github.com/agilexrobotics/ugv_gazebo_sim.gitgit clone https://github.com/agilexrobotics/ranger_ros2.git
cd ~/ranger_ws/srcgit clone https://github.com/agilexrobotics/ugv_sdk.gitcd ugv_sdkmkdir build && cd buildcmake ..makesudo make install
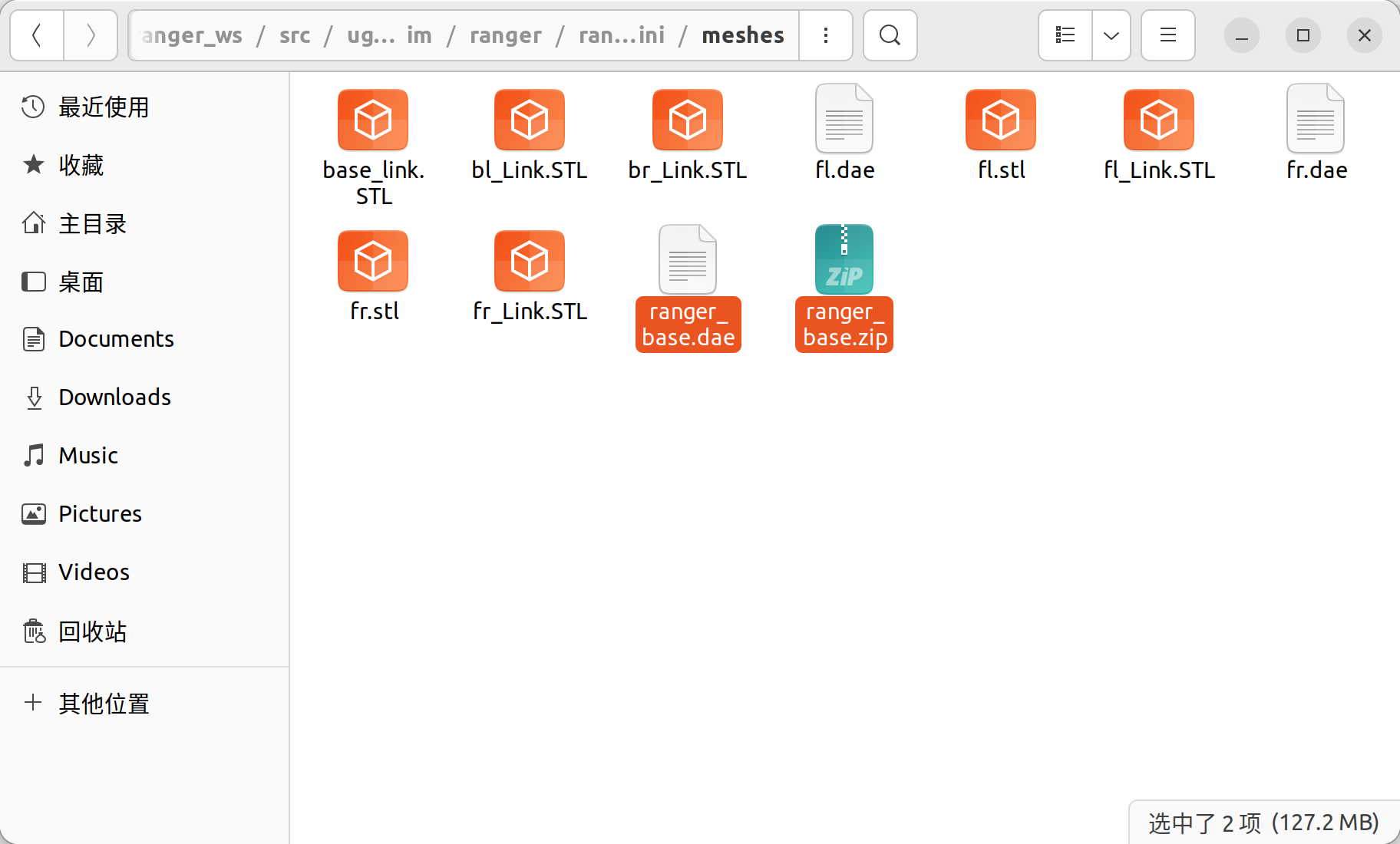
# 关键:v3.0 的模型文件较大,通常需要手动解压网格文件
cd ~/ranger_ws/src/ugv_gazebo_sim/ranger/ranger_mini/meshes/unzip ranger_base.zip
编译
cd ~/ranger_wsrosdep install --from-paths src --ignore-src -r -ycolcon build --symlink-install
坐标系 (Map → Odom)
Ranger Mini v3.0 的驱动会自动发布 odom -> base_link 的 TF。要获得 map 参考系,启动 SLAM 节点:
ros2 launch slam_toolbox online_async_launch.py use_sim_time:=true
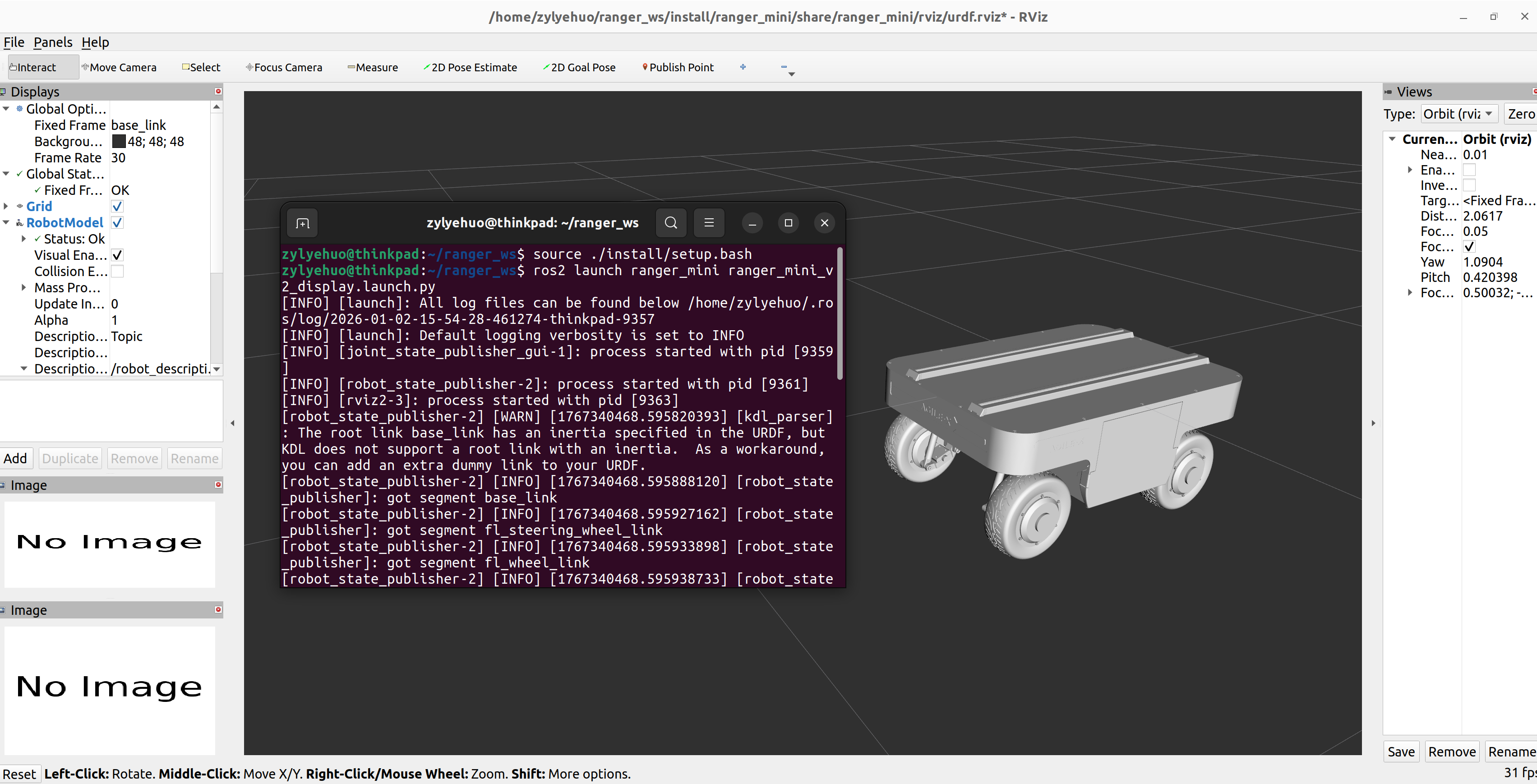
启动流程
source install/setup.bashros2 launch ranger_mini ranger_mini_v2_display.launch.py