GPIO外设接口原理
GPIO(通用输入输出端口)是STM32最基础的外设,可通过软件配置为输入、输出、复用或模拟模式,用于连接LED、按键、传感器等外部器件。其核心配置流程为:定义初始化结构体 → 开启外设时钟 → 配置结构体成员 → 初始化外设。
核心配置步骤(以LED点亮为例,LED接PF10引脚)
代码
#include "stm32f4xx.h"/*** @brief LED初始化函数:配置PF10引脚为推挽输出模式,用于驱动LED点亮* @param None 无输入参数* @retval None 无返回值* @note 步骤遵循:定义结构体→开时钟→配置结构体→初始化外设*/
void LED_Config(void)
{// 1. 定义GPIO初始化结构体(类型在stm32f4xx_gpio.h中声明)GPIO_InitTypeDef GPIO_InitStructure;// 2. 开启GPIOF端口时钟(GPIO挂载在AHB1总线,需用对应时钟使能函数)/*** @brief AHB1总线外设时钟使能函数* @param RCC_AHB1Periph 要开启的AHB1外设(如RCC_AHB1Periph_GPIOF对应GPIOF端口)* @param NewState 时钟状态(ENABLE=开启,DISABLE=关闭)* @retval None 无返回值* @note STM32外设需先开时钟才能操作,否则配置无效*/RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);// 3. 配置结构体成员(对应GPIO的核心参数)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // 选择要配置的引脚:PF10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 模式:输出模式GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 输出类型:推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 输出速度:100MHz(高速)GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; // 内部电阻:无上下拉// 4. 初始化GPIOF端口(将结构体配置写入寄存器)/*** @brief GPIO端口初始化函数* @param GPIOx 要初始化的GPIO端口(x=A~K,如GPIOF)* @param GPIO_InitStruct 指向GPIO初始化结构体的指针(包含配置参数)* @retval None 无返回值* @note 必须先开启对应端口时钟,再调用此函数*/GPIO_Init(GPIOF, &GPIO_InitStructure);
}/*** @brief 主函数:程序入口,初始化后点亮LED* @param None 无输入参数* @retval int 程序运行状态(正常退出返回0,实际嵌入式中一般不返回)*/
int main(void)
{// 硬件初始化:配置LED对应的GPIO引脚LED_Config();// 死循环:保持LED常亮while (1){// 方法1:通过BSRRH寄存器将PF10拉低(原子操作,避免中断干扰)GPIOF->BSRRH |= 1 << 10; // BSRRH:端口复位寄存器,对应位写1则引脚输出低电平// 方法2:通过ODR寄存器拉低(也可实现,但非原子操作)// GPIOF->ODR &= ~GPIO_Pin_10;}
}
关键知识点
① GPIO初始化结构体(GPIO_InitTypeDef)
结构体成员对应GPIO的核心配置参数,所有参数需在初始化前赋值:
-
GPIO_Pin:指定要配置的引脚(0~15),多个引脚可用|组合(如GPIO_Pin_9 | GPIO_Pin_8),宏定义为16位无符号整数(每bit对应一个引脚); -
GPIO_Mode:工作模式(4种)——枚举:GPIO_Mode_IN:输入模式(读取外部信号,如按键);GPIO_Mode_OUT:输出模式(控制外部器件,如LED);GPIO_Mode_AF:复用模式(用于串口、SPI等外设功能);GPIO_Mode_AN:模拟模式(用于ADC、DAC等模拟信号);
-
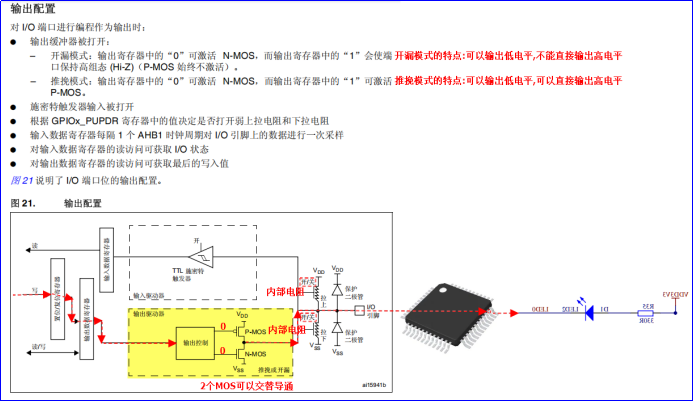
GPIO_OType:输出类型(仅输出模式有效)——枚举:GPIO_OType_PP:推挽输出(可直接输出高/低电平,驱动能力强,适合LED、继电器);GPIO_OType_OD:开漏输出(仅能拉低电平,需外接上拉电阻才能输出高电平,适合IIC总线);
-
GPIO_Speed:输出速度(影响电平翻转速度和功耗)——宏定义:GPIO_Speed_2MHz(低速)、GPIO_Speed_25MHz(中速)、GPIO_Speed_50MHz(快速)、GPIO_Speed_100MHz(高速);- 速度越快,功耗和电磁干扰越大,无特殊要求时选高速即可;
-
GPIO_PuPd:内部上下拉电阻(稳定引脚电平)——枚举: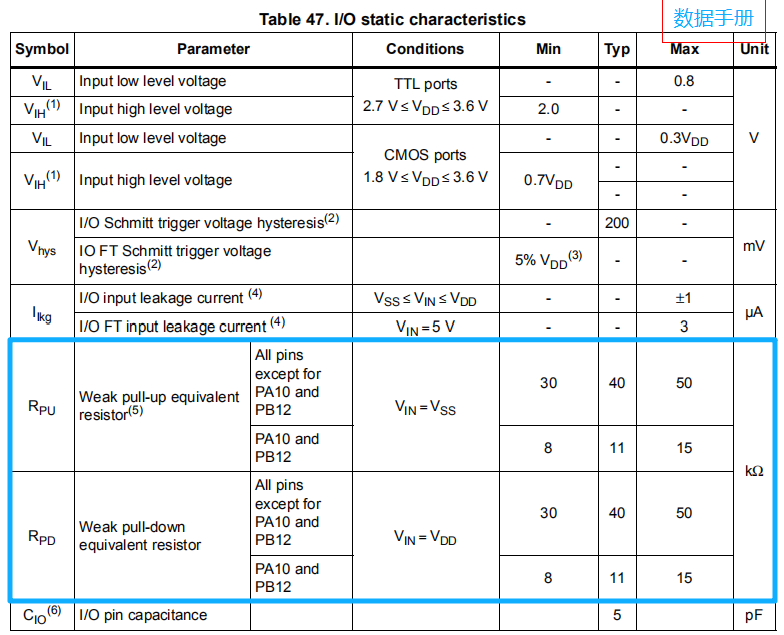
GPIO_PuPd_NOPULL:无上下拉(引脚悬空,需外部电路稳定);GPIO_PuPd_UP:上拉电阻(无外部信号时引脚为高电平);GPIO_PuPd_DOWN:下拉电阻(无外部信号时引脚为低电平)。
② 外设时钟开启原理
STM32的外设和内核通过总线通信,常用总线有3条:
- AHB1:高速总线(最大168MHz),挂载GPIO、DMA、CRC等外设;
- APB1:低速总线(最大42MHz),挂载UART2~UART5、IIC等外设;
- APB2:高速总线(最大84MHz),挂载UART1、SPI1等外设;
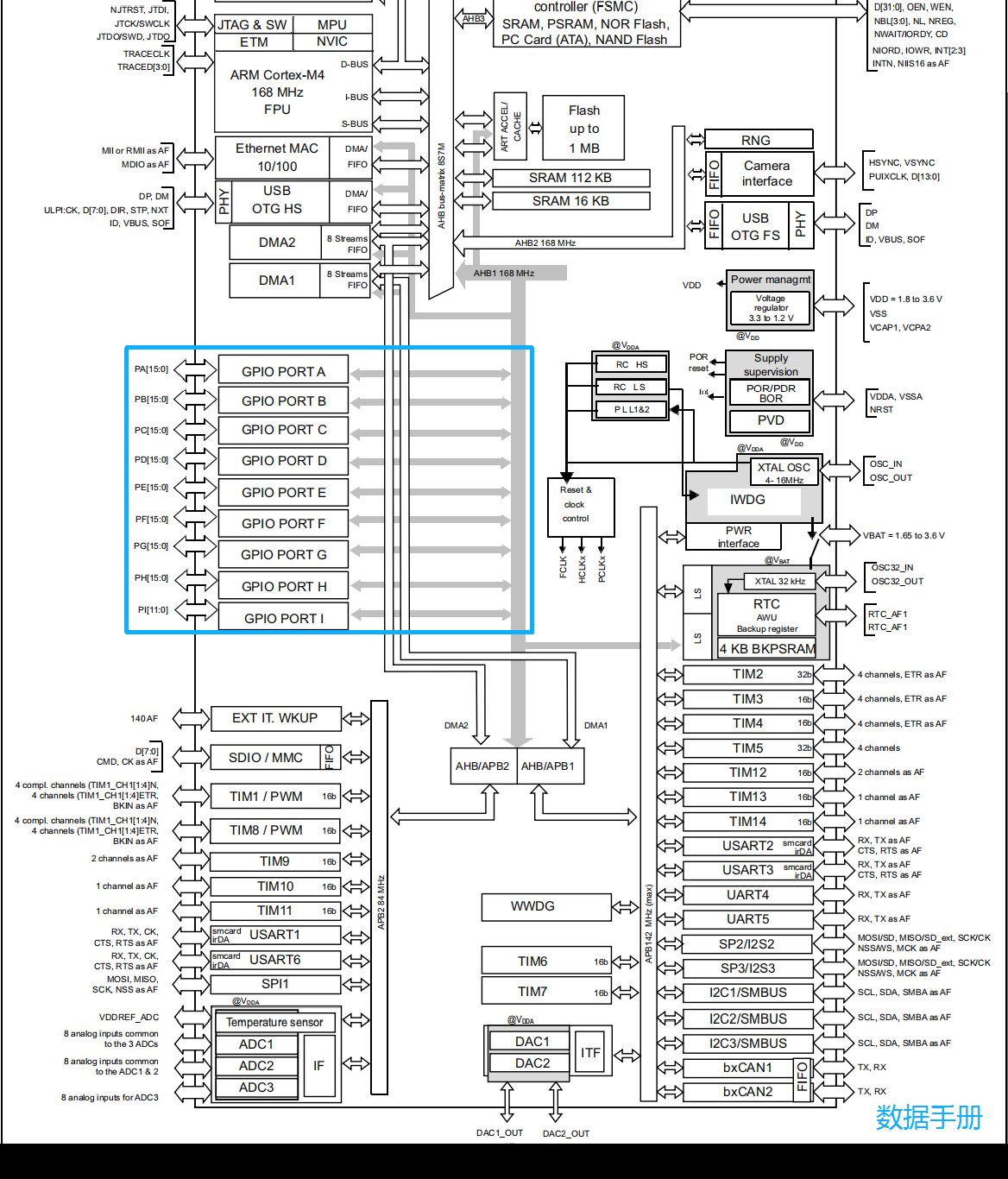
GPIO均挂载在AHB1总线,因此必须使用RCC_AHB1PeriphClockCmd函数开启对应端口时钟,否则GPIO配置无效(STM32默认关闭外设时钟以降低功耗)。
寄存器开发流程
函数库开发(标准库/HAL库)本质是对寄存器的封装,寄存器开发直接操作硬件寄存器,具有运行效率高、占用内存小的特点,适合实时性要求高的场景。核心流程:查原理图→析控制逻辑→找寄存器→算地址→指针操作→读写配置。
寄存器开发核心步骤(以PF9点亮LED为例)
步骤拆解
-
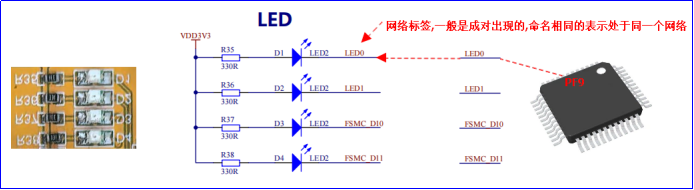
查原理图:确认LED连接的GPIO引脚(如LED→PF9,低电平点亮);
-
分析控制逻辑:PF9输出低电平时,LED导通点亮;输出高电平时,LED熄灭;
-
找寄存器:GPIO端口包含10个核心寄存器(参考手册),关键配置寄存器如下:
寄存器名称 偏移地址 功能描述 GPIOx_MODER 0x00 模式配置寄存器(2bit控制1个引脚,00=输入,01=输出) GPIOx_OTYPER 0x04 输出类型寄存器(1bit控制1个引脚,0=推挽,1=开漏) GPIOx_OSPEEDR 0x08 输出速度寄存器(2bit控制1个引脚,00=2MHz,11=100MHz) GPIOx_PUPDR 0x0C 上下拉寄存器(2bit控制1个引脚,00=无上下拉) GPIOx_ODR 0x14 输出数据寄存器(1bit控制1个引脚,0=低电平,1=高电平) GPIOx_BSRR 0x18 置位/复位寄存器(高16位=复位,低16位=置位,原子操作)
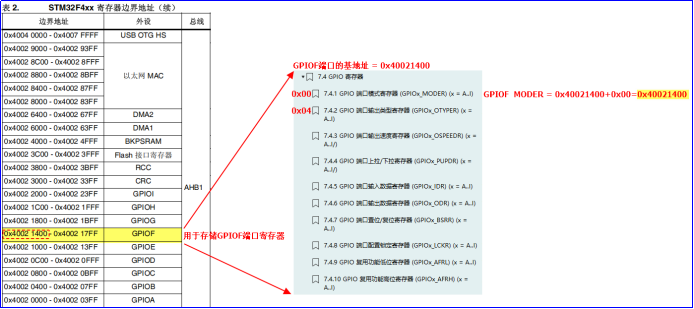
算地址:寄存器物理地址=端口基地址+偏移地址:
- GPIOF基地址:0x40021400(AHB1总线GPIO端口地址分配);
- GPIOF_MODER地址:0x40021400 + 0x00 = 0x40021400;
- GPIOF_ODR地址:0x40021400 + 0x14 = 0x40021414;
指针操作:将寄存器地址强制转换为volatile指针(避免编译器优化);
读写配置:通过指针读写寄存器值,完成引脚配置。
寄存器开发代码
#include "stm32f4xx.h"// 定义GPIOF核心寄存器指针(基地址+偏移地址,volatile修饰避免优化)
#define GPIOF_BASE 0x40021400 // GPIOF端口基地址
#define GPIOF_MODER *(volatile uint32_t*)(GPIOF_BASE + 0x00) // 模式寄存器
#define GPIOF_OTYPER *(volatile uint32_t*)(GPIOF_BASE + 0x04) // 输出类型寄存器
#define GPIOF_OSPEEDR *(volatile uint32_t*)(GPIOF_BASE + 0x08) // 输出速度寄存器
#define GPIOF_PUPDR *(volatile uint32_t*)(GPIOF_BASE + 0x0C) // 上下拉寄存器
#define GPIOF_ODR *(volatile uint32_t*)(GPIOF_BASE + 0x14) // 输出数据寄存器
#define GPIOF_BSRR *(volatile uint32_t*)(GPIOF_BASE + 0x18) // 置位/复位寄存器// RCC_AHB1时钟使能寄存器(开启GPIOF时钟)
#define RCC_AHB1ENR *(volatile uint32_t*)(0x40023800 + 0x30) // RCC基地址0x40023800,偏移0x30/*** @brief 寄存器方式初始化LED(PF9)* @param None 无输入参数* @retval None 无返回值*/
void LED_Reg_Config(void)
{// 1. 开启GPIOF时钟(RCC_AHB1ENR第5位对应GPIOF,写1使能)RCC_AHB1ENR |= (1 << 5); // 1<<5 = 0x00000020,对应GPIOF时钟位// 2. 配置PF9为输出模式(GPIOx_MODER第18~19位控制PF9)GPIOF_MODER &= ~(0x03 << (2 * 9)); // 先清0(0x03=2bit,左移18位对应PF9的模式位)GPIOF_MODER |= (0x01 << (2 * 9)); // 再置1(01=输出模式)// 3. 配置PF9为推挽输出(GPIOx_OTYPER第9位控制PF9,0=推挽)GPIOF_OTYPER &= ~(1 << 9);// 4. 配置PF9为100MHz高速(GPIOx_OSPEEDR第18~19位,11=高速)GPIOF_OSPEEDR &= ~(0x03 << (2 * 9));GPIOF_OSPEEDR |= (0x03 << (2 * 9));// 5. 配置PF9为无上下拉(GPIOx_PUPDR第18~19位,00=无上下拉)GPIOF_PUPDR &= ~(0x03 << (2 * 9));
}int main(void)
{LED_Reg_Config(); // 寄存器方式初始化LEDwhile (1){// 方式1:通过ODR寄存器拉低PF9(LED点亮)GPIOF_ODR &= ~(1 << 9);// 方式2:通过BSRR寄存器拉低PF9(原子操作,更安全,避免中断干扰)// GPIOF_BSRR = (1 << (9 + 16)); // 高16位=复位(拉低)}
}
关键知识点
-
volatile关键字:修饰易变变量(如寄存器),告诉编译器“该变量值可能随时变化,禁止优化”,避免编译器将寄存器值缓存到CPU寄存器,导致读写失效;
典型应用
- 多线程编程中,被多条线程共享的临界资源
-
场景说明:在 FreeRTOS 等实时操作系统中,多个线程可能同时读写同一个全局变量(如任务标志位、计数器)。编译器优化可能导致线程读取到缓存的旧值,而非最新的内存值,引发逻辑错误。
-
示例:
// 共享临界资源(必须用volatile修饰) volatile uint8_t g_task_flag = 0; // 线程1:修改标志位 void task1(void *param) {while(1){g_task_flag = 1; // 置位标志位vTaskDelay(1000); // 延时1秒} }// 线程2:读取标志位 void task2(void *param) {while(1){if(g_task_flag == 1) // 直接读取内存中的最新值{// 执行对应逻辑g_task_flag = 0;}vTaskDelay(100);} } -
若无 volatile 修饰:编译器可能将
g_task_flag缓存到线程 2 的 CPU 寄存器中,即使线程 1 修改了内存中的值,线程 2 仍读取缓存的旧值,导致逻辑失效。
-
- 访问硬件寄存器的时候,需要对寄存器进行修饰
-
场景说明:STM32 的硬件寄存器(如 GPIO_ODR、RCC_AHB1ENR)的值可能被硬件自动修改(如外设状态变化),也可能被软件写入。编译器无法预知这种 “意外修改”,若不修饰,可能优化为读取缓存值,而非实际寄存器状态。
-
示例:
// 正确:寄存器指针用volatile修饰 #define GPIOA_ODR *(volatile uint32_t*)(0x40020014)// 错误:无volatile修饰,可能读取缓存值 #define GPIOA_ODR_ERR *(uint32_t*)(0x40020014)void read_gpio_state(void) {uint32_t state;state = GPIOA_ODR; // 正确:读取GPIOA端口的实际输出状态state = GPIOA_ODR_ERR; // 错误:可能读取到编译器缓存的旧值,与硬件实际状态不一致 } -
核心原因:寄存器是硬件映射的内存地址,其值的变化不受软件完全控制,必须通过 volatile 强制每次访问实际地址。
-
- 在中断服务程序 ISR 中访问的全局变量
-
场景说明:中断服务程序(如外部中断、定时器中断)会异步修改全局变量,主循环或其他线程同步读取该变量。编译器优化可能导致主循环读取缓存值,无法感知 ISR 对变量的修改,引发数据同步问题。
-
示例:
// 中断中访问的全局变量(必须用volatile修饰) volatile uint32_t g_int_count = 0;// 外部中断服务程序:修改全局变量 void EXTI0_IRQHandler(void) {if(EXTI_GetITStatus(EXTI_Line0) != RESET){g_int_count++; // 异步修改全局变量EXTI_ClearITPendingBit(EXTI_Line0); // 清除中断标志位} }// 主循环:读取全局变量 int main(void) {uint32_t local_count;while(1){local_count = g_int_count; // 读取最新的中断计数(直接访问内存)// 基于计数执行逻辑} } -
若无 volatile 修饰:编译器可能认为主循环中
g_int_count的值不会被 “主动修改”,将其优化为一次读取后缓存,即使 ISR 多次修改内存中的值,主循环仍使用最初的缓存值,导致计数错误。
-
- 多线程编程中,被多条线程共享的临界资源
-
原子操作:
BSRR寄存器支持置位(低16位)和复位(高16位),一次写操作完成,不会被中断打断,比ODR寄存器更安全(ODR需先读再改,可能被中断干扰); -
寄存器位操作:配置时先“清0”再“置1”,避免影响其他引脚(如
GPIOF_MODER &= ~(0x03 << (2 * 9))先清除PF9的模式位,再|= (0x01 << (2 * 9))设置为输出模式)。
蜂鸣器原理与应用
蜂鸣器是将电信号转换为声音信号的电子器件,分为有源和无源两种,通过GPIO控制三极管驱动,广泛用于提示音、警报音场景。
三极管(驱动蜂鸣器的关键前提)
三极管本质与作用
三极管(BJT,双极结型晶体管)是电流控制电流的半导体器件,核心作用是:
-
放大:用微弱的基极电流(Ib)控制较大的集电极电流(Ic);
-
开关:工作在饱和 / 截止状态,等效为 “电子开关”(驱动蜂鸣器、继电器等大电流负载);
-
核心逻辑:Ib 是 “控制信号”,Ic 是 “被控制信号”,满足
Ic ≈ β × Ib(β 为电流放大系数,通常 20~200)。
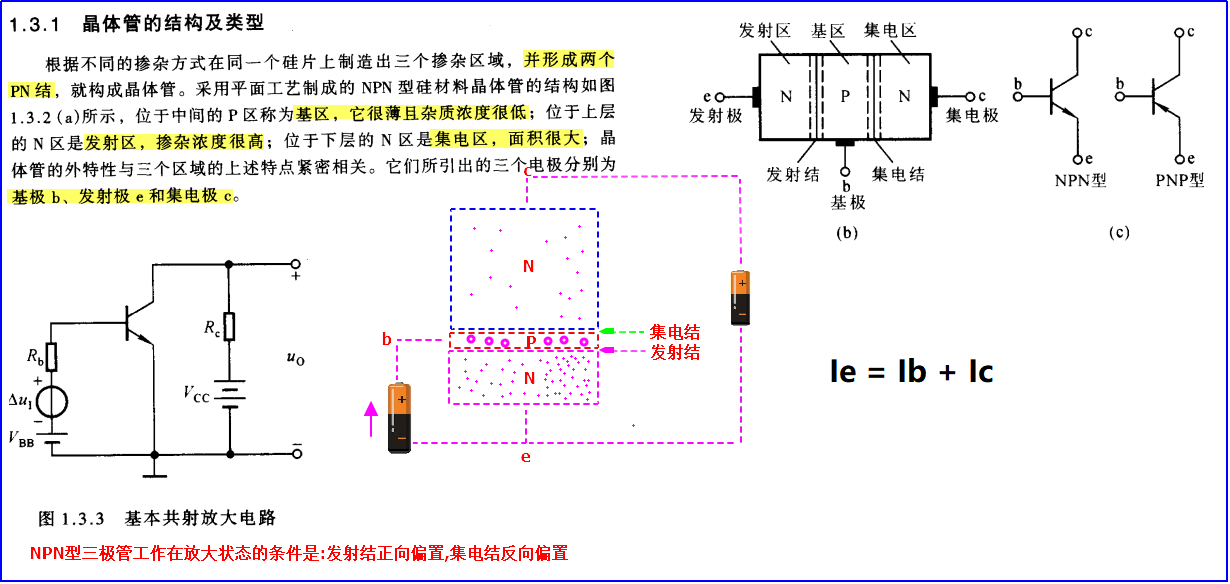
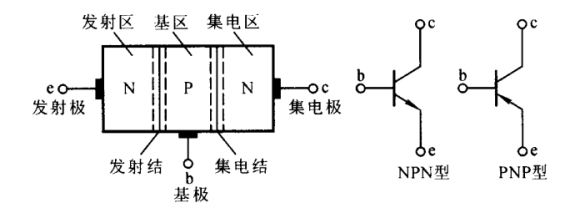
三极管基本结构与类型
三极管有 3 个掺杂区域和 2 个 PN 结,引出 3 个电极,分为两种类型:
| 类型 | 结构(自上而下) | 电极极性 | 导通条件(核心区别) | 典型型号 |
|---|---|---|---|---|
| NPN | 发射区(N)→ 基区(P)→ 集电区(N) | 发射极(e,低电位)、基极(b,中电位)、集电极(c,高电位) | 基极相对于发射极高 0.7V(硅管),即 Vb > Ve + 0.7V | S8050、2N3904 |
| PNP | 发射区(P)→ 基区(N)→ 集电区(P) | 发射极(e,高电位)、基极(b,中电位)、集电极(c,低电位) | 基极相对于发射极低 0.7V(硅管),即 Vb < Ve - 0.7V | S8550、2N3906 |
- 注:蜂鸣器驱动常用 NPN 型(高电平导通,适配 GPIO 输出逻辑),PNP 型则为低电平导通,需反向设计电路。
三极管三种工作状态
| 工作状态 | 发射结(BE 结) | 集电结(BC 结) | 核心电流关系 | 等效功能 | 通用应用场景 |
|---|---|---|---|---|---|
| 截止状态 | 反向偏置 或 零偏置((Vbe < Von),未导通) | 反向偏置 | (I_b ≈ 0)(基极无驱动电流),(I_c ≈ I_{ceo})(穿透电流,近似为 0) | 电子开关断开 | 电路关断、信号截止(如数字电路中的高阻态、设备待机断电) |
| 饱和状态 | 正向偏置((Vbe) 钳位在 Von,硅管≈0.7V,锗管≈0.2V,不显著偏离) | 正向偏置 | (I_c) 由负载 / 电源电压决定,且 (I_c < β×I_b)(集电结正偏导致放大能力失效,Ic 不再随 Ib 线性增大) | 电子开关闭合 | 开关驱动(继电器、LED、蜂鸣器、电机启停)、数字电路逻辑输出 |
| 放大状态 | 正向偏置((Vbe) 钳位在 Von,稳定不变) | 反向偏置 | (I_c = β×I_b)(线性放大关系,Ib 的微小变化会引发 Ic 的大幅变化,放大倍数为 β) | 信号线性放大 | 音频放大、传感器微弱信号调理(如温度 / 压力传感器信号放大)、射频电路、功率放大 |
- 驱动蜂鸣器的核心要求:让三极管工作在饱和状态(确保 Ic 足够大,驱动蜂鸣器发声),避免放大状态(电流不稳定,可能导致蜂鸣器声音异常)。
关键参数(选型与电路设计的核心依据)
| 参数 | 定义 | 选型要求(蜂鸣器驱动) |
|---|---|---|
| β(电流放大系数) | Ic 与 Ib 的比值(β = Ic / Ib) | 选 β=50~100 的型号(如 S8050 的 β 典型值 80),β 过小需更大 Ib 才能饱和,β 过大易受干扰 |
| Ic_max(最大集电极电流) | 三极管允许通过的最大 Ic | 必须大于蜂鸣器工作电流(如蜂鸣器电流 20mA,选 Ic_max≥50mA 的 S8050,留冗余) |
| Vce (sat)(饱和压降) | 饱和时集电极与发射极的电压差 | 越小越好(S8050 约 0.2~0.3V),降低功耗,避免蜂鸣器电压不足 |
| Vcbo(集电极 - 基极反向电压) | 承受的最大反向电压 | 大于蜂鸣器供电电压(如 5V 供电,选 Vcbo≥20V 的型号,防击穿) |
蜂鸣器分类(核心区别:是否内置振荡源)
| 参数 | 有源蜂鸣器 | 无源蜂鸣器 |
|---|---|---|
| 驱动方式 | 内置振荡电路,通直流电直接发声 | 无振荡电路,需外部交变信号(如PWM)驱动 |
| 工作电压 | 直流电压(3V/5V/12V) | 交变电压(由外部信号提供) |
| 频率控制 | 频率固定,不可调节 | 频率由外部信号决定,可调节音调 |
| 功耗 | 较高(需维持内部振荡) | 较低(仅信号输入时工作) |
| 应用场景 | 固定频率提示音(门铃、烟雾报警器) | 多音调场景(音乐播放、复杂警报) |
| 控制方式 | 仅控制通断(高电平/低电平) | 控制通断+频率(PWM占空比/频率调节) |
驱动电路原理(以NPN三极管驱动为例)
电路结构
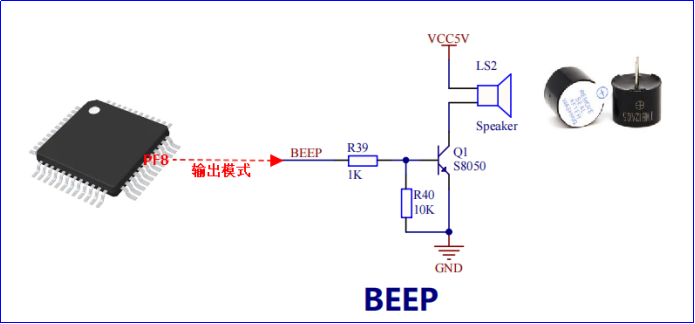
三极管作为开关使用,仅需关注饱和状态(导通)和截止状态(断开):
饱和状态(导通)
- 发射极(e):直接接 GND,所以
V_e = 0V; - 基极(b):PF8 输出高电平 3.3V,经过 1KΩ 电阻(R39)后,BE 结正向导通(硅管导通压降固定为 0.7V),所以基极电压被钳位在
V_b = V_e + 0.7V = 0 + 0.7V = 0.7V; - 集电极(c):接 VCC5V + 蜂鸣器,三极管饱和导通时,集电极 - 发射极的饱和压降
V_ce ≈ 0.2V(S8050 的典型值),所以集电极电压V_c = V_e + V_ce = 0 + 0.2V = 0.2V。 - 发射结(BE 结):
V_b - V_e = 0.7V - 0V = 0.7V > 0→ 正向偏置; - 集电结(BC 结):
V_b - V_c = 0.7V - 0.2V = 0.5V > 0→ 正向偏置。
截止状态(断开)
- 发射极(e):直接接 GND,所以
V_e = 0V; - 基极(b):PF8 输出低电平(≈0V),同时基极通过 10KΩ 下拉电阻(R40)接地,因此基极电压被拉到 GND 附近,
V_b ≈ 0V; - 集电极(c):三极管截止时,集电极无电流,蜂鸣器不导通,集电极电压等于电源电压,所以
V_c = VCC5V = 5V; - 发射结(BE 结):
V_b - V_e = 0V - 0V = 0V < 0.7V(未达到导通压降)→ 反向偏置(或零偏置,不符合导通条件); - 集电结(BC 结):
V_b - V_c = 0V - 5V = -5V < 0→ 反向偏置。
控制逻辑
- GPIO引脚(PF8)输出高电平时:基极电流Ib流过,三极管饱和导通,蜂鸣器负极接地,形成回路,发声;
- GPIO引脚(PF8)输出低电平时:基极无电流,三极管截止,蜂鸣器无回路,静音。
蜂鸣器程序设计(寄存器方式,PF8引脚)
#include "stm32f4xx.h"// 定义GPIOF寄存器指针(同LED部分,新增PF8配置)
#define GPIOF_BASE 0x40021400
#define GPIOF_MODER *(volatile uint32_t*)(GPIOF_BASE + 0x00)
#define GPIOF_OTYPER *(volatile uint32_t*)(GPIOF_BASE + 0x04)
#define GPIOF_OSPEEDR *(volatile uint32_t*)(GPIOF_BASE + 0x08)
#define GPIOF_PUPDR *(volatile uint32_t*)(GPIOF_BASE + 0x0C)
#define GPIOF_ODR *(volatile uint32_t*)(GPIOF_BASE + 0x14)
#define RCC_AHB1ENR *(volatile uint32_t*)(0x40023800 + 0x30)/*** @brief 初始化蜂鸣器(PF8引脚,NPN三极管驱动)* @param None 无输入参数* @retval None 无返回值*/
void Buzzer_Config(void)
{// 1. 开启GPIOF时钟RCC_AHB1ENR |= (1 << 5);// 2. 配置PF8为推挽输出模式GPIOF_MODER &= ~(0x03 << (2 * 8)); // PF8对应MODER第16~17位(2bit)GPIOF_MODER |= (0x01 << (2 * 8)); // 01=输出模式// 3. 推挽输出(驱动能力强)GPIOF_OTYPER &= ~(1 << 8);// 4. 100MHz高速GPIOF_OSPEEDR &= ~(0x03 << (2 * 8));GPIOF_OSPEEDR |= (0x03 << (2 * 8));// 5. 无上下拉(基极有外部下拉电阻)GPIOF_PUPDR &= ~(0x03 << (2 * 8));// 初始化状态:蜂鸣器静音(PF8输出低电平)GPIOF_ODR &= ~(1 << 8);
}/*** @brief 控制蜂鸣器发声* @param status 1=发声,0=静音* @retval None 无返回值*/
void Buzzer_Set(uint8_t status)
{if (status == 1){GPIOF_ODR |= (1 << 8); // PF8输出高电平,三极管导通,蜂鸣器发声}else{GPIOF_ODR &= ~(1 << 8); // PF8输出低电平,三极管截止,蜂鸣器静音}
}int main(void)
{// C89:变量定义放在代码块最开头(可执行语句之前)uint32_t i; // 所有变量集中在代码块起始位置定义Buzzer_Config(); // 初始化蜂鸣器while (1){Buzzer_Set(1); // 可执行语句(函数调用)放在变量定义之后for(i=0; i<5000000; i++);Buzzer_Set(0);for(i=0; i<5000000; i++);}
}
拓展:无源蜂鸣器PWM驱动
无源蜂鸣器需交变信号驱动,可通过GPIO输出PWM波控制音调:
- 配置GPIO为复用模式(如复用为定时器通道);
- 初始化定时器,设置PWM频率(如1kHz~5kHz,对应不同音调);
- 通过调节定时器比较值控制PWM占空比(影响音量)。
总结
- GPIO配置核心:开时钟→选引脚→设模式→配输出类型/速度/上下拉→初始化;
- 寄存器开发优势:效率高、占内存小,适合实时性场景,核心是“地址→指针→位操作”;
- 蜂鸣器驱动核心:通过GPIO控制三极管通断,有源仅需高低电平,无源需PWM信号;
- 注意点:配置前必须开启外设时钟,寄存器操作需用volatile修饰,位操作遵循“先清后置”。