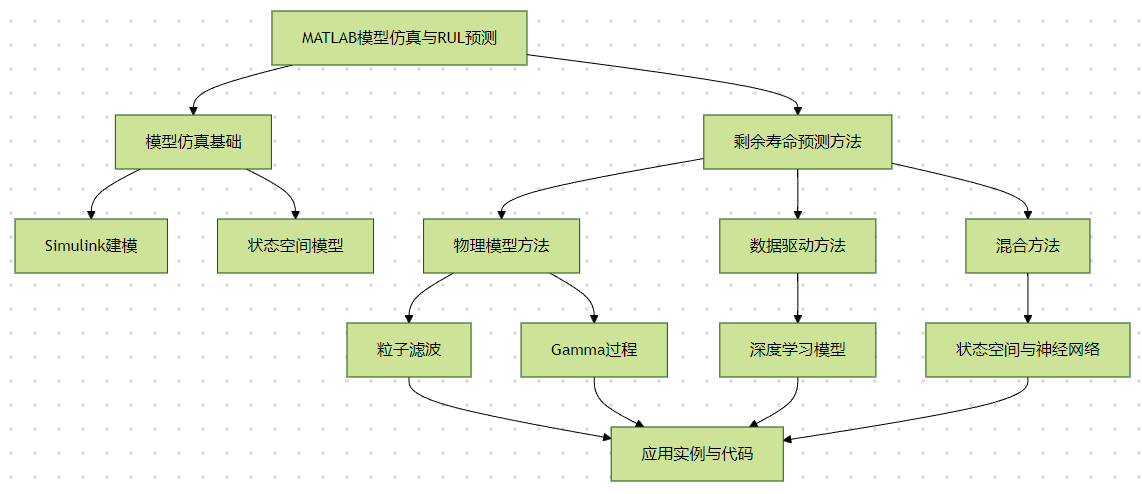
模型仿真基础
-
Simulink建模:Simulink是MATLAB中用于动态系统和嵌入式系统的多领域仿真工具。你可通过拖放模块图方式构建系统模型。
- 基本步骤:打开Simulink库浏览器 → 选择并添加模块(如Sources库中的Pulse Generator、Math Operations库中的Gain、Continuous库中的Integrator、Sinks库中的Scope) → 连接模块 → 配置参数 → 运行仿真并查看结果。
- 简单示例:构建一个简化的汽车运动模型,对脉冲信号(代表油门踏板)进行两次积分,得到汽车位置(斜坡信号)。
-
状态空间模型:对于机械系统等,常使用状态空间模型进行建模。例如,一个由质量、弹簧和阻尼器组成的简单机械系统,其动力学可以用二阶微分方程描述,并通过积分器模块求解速度和位移。
剩余寿命预测方法
设备剩余寿命(RUL)预测方法主要可分为三类:基于物理模型的方法、数据驱动的方法以及混合方法。
-
基于物理模型的方法:
这类方法依赖于对设备退化过程的物理建模。- 粒子滤波:适用于非线性和非高斯系统。其核心思想是用一组随机样本(粒子)来近似系统状态的后验概率分布,通过预测和更新步骤,递推估计系统状态(如电池健康状态SOH),进而预测RUL。在电池RUL预测中,通过非线性动力学模型模拟电池老化过程,粒子滤波器处理观测数据以估计SOH变化趋势。
- Gamma随机过程:Gamma过程的增量服从Gamma分布,可用于描述单调退化过程(如电池容量衰减)。常结合EM算法进行参数估计,从而预测RUL。
-
数据驱动的方法:
这类方法利用历史监测数据,通过机器学习或深度学习模型学习退化规律,不依赖具体的物理模型。- 深度学习模型:常见的模型包括卷积神经网络(CNN)、循环神经网络(RNN,如LSTM、GRU)以及Transformer。它们能够从传感器数据(如振动信号)中自动提取特征并建立与RUL的映射关系。例如,Kolmogorov-Arnold网络(KAN) 作为一种新兴的网络结构,因其 interpretability 和效率在一些RUL预测研究中展现出潜力。
- 自数据驱动方法:这种方法仅利用设备自身的历史监测数据,而不依赖大量同类设备的故障数据,适用于故障数据稀缺的场景。例如,一种名为Phyformer的方法结合了退化物理信息与Transformer架构。
- 核密度估计:这是一种非参数方法,用于估计退化量的概率密度函数。随着新监测数据的到来,可以更新核密度估计,从而更新RUL的概率分布。
-
混合方法:
混合方法旨在结合物理模型与数据驱动方法的优点,例如利用状态空间模型描述系统动力学,同时利用神经网络强大的非线性拟合能力,以提高预测的准确性和鲁棒性。例如,一种两阶段混合状态空间模型被提出用于描述时变运行条件下旋转机械的整个生命周期中运行条件、系统状态和响应信号之间的动态关系。
M代码
-
粒子滤波RUL预测示例:
以下是一个基于粒子滤波器预测电池剩余使用寿命的简化MATLAB代码框架:% 初始化参数 M = 1000; % 粒子数量 N = length(Data); % 数据长度 Xnoise = zeros(2, M, N); % 状态粒子 [SOH; 退化速率] Weight = zeros(N, M); % 粒子权重% 初始化粒子 Xnoise(1, :, 1) = randn(1, M) * sqrt(Xvar) + X0(1); Xnoise(2, :, 1) = randn(1, M) * sqrt(Bvar) + X0(2);for k = 2:N% 预测步骤:状态转移for i = 1:MXnoise(1, i, k) = Xnoise(1, i, k-1) * exp(Xnoise(2, i, k-1) * (k - (k-1))) + sqrt(Xvar) * randn();Xnoise(2, i, k) = Xnoise(2, i, k-1) + sqrt(Bvar) * randn();end% 更新步骤:计算权重for i = 1:MZnoise(1, i, k) = Xnoise(1, i, k) + Zstd * randn(); % 观测模型Weight(k, i) = exp(-(Ym(1, k) - Znoise(1, i, k))^2 / (2 * R)) + 1e-99;end% 权重归一化Weight(k, :) = Weight(k, :) / sum(Weight(k, :));% 重采样outIndex = systematicR(Weight(k, :));Xnoise(:, :, k) = Xnoise(:, outIndex, k); end% 基于粒子状态估计SOH并预测RUL % ... (后续根据SOH轨迹外推或使用模型预测达到失效阈值的时间) -
CNN-LSTM网络RUL预测示例:
以下是一个结合CNN和LSTM进行RUL预测的简化代码框架:% 创建CNN-LSTM网络 layers = [ ...sequenceInputLayer(inputSize) % 输入层convolution1dLayer(5, 32, 'Padding', 'same') % 1D卷积层reluLayer()maxPooling1dLayer(2, 'Stride', 2)lstmLayer(64, 'OutputMode', 'sequence') % LSTM层fullyConnectedLayer(32)reluLayer()fullyConnectedLayer(1) % 输出RULregressionLayer()];% 训练选项 options = trainingOptions('adam', ...'MaxEpochs', 50, ...'InitialLearnRate', 1e-3, ...'Verbose', false, ...'Plots', 'training-progress');% 训练网络 net = trainNetwork(XTrain, YTrain, layers, options);% 预测 YPred = predict(net, XTest); -
Simulink模型集成:
你可以在Simulink中建立系统的物理模型,并嵌入上述算法模块进行联合仿真。例如,在Simulink模型中,可以使用MATLAB Function模块调用自定义的RUL预测函数,实现实时健康监测和预测。
参考代码 基于MATLAB的模型仿真以及设备的剩余寿命预测 www.3dddown.com/cna/82242.html
选择哪种方法往往取决于你对设备退化机理的理解、数据的数量与质量,以及具体的精度要求。